openEASE
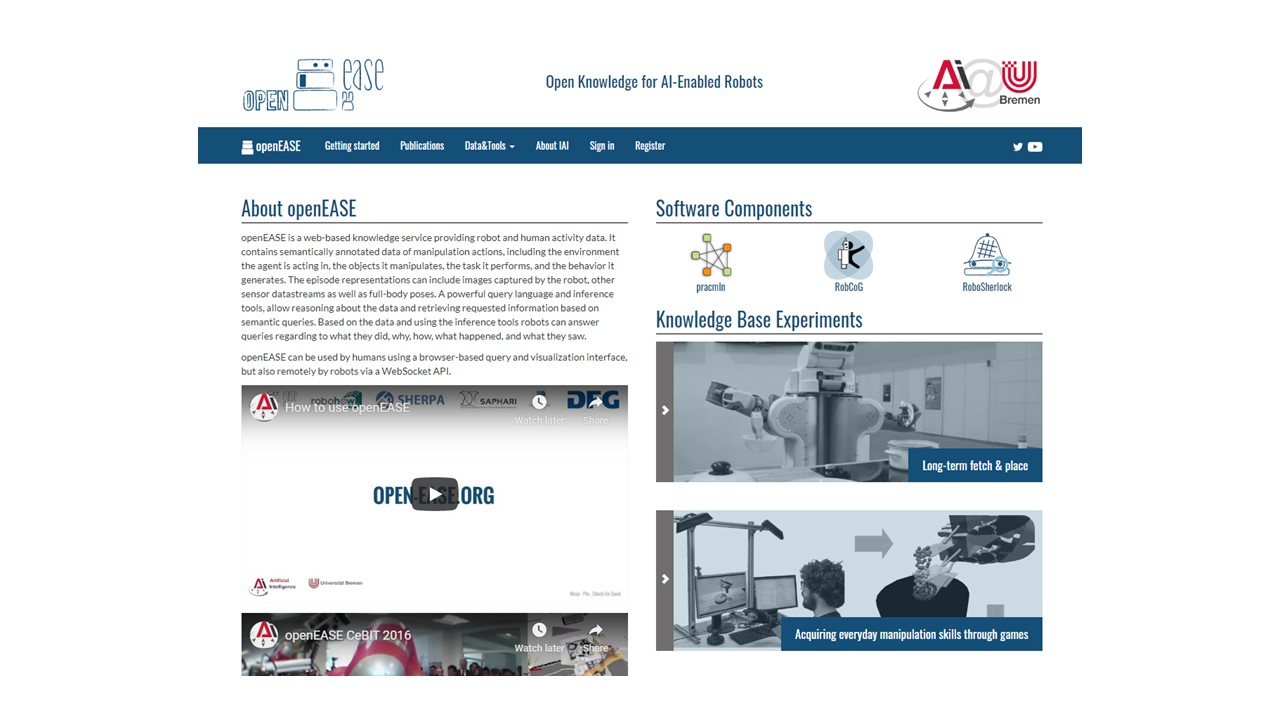
openEASE is a web-based knowledge service providing robot and human activity data. It contains semantically annotated…
openEASE is a web-based knowledge service providing robot and human activity data. It contains semantically annotated…
openEASE is a web-based knowledge service providing robot and human activity data. It contains semantically annotated data of manipulation actions, including the environment the agent is acting in, the objects it manipulates, the task it performs, and the behavior it generates. The episode representations can include images captured by the robot, other sensor data streams as well as full-body poses.
A powerful query language and inference tools, allow reasoning about the data and retrieving requested information based on semantic queries. Based on the data and using the inference tools robots can answer queries regarding what they did, why, how, what happened, and what they saw.
openEASE can be used by humans using a browser-based query and visualization interface, but also remotely by robots via a WebSocket API.
Internet is huge! Help us find great content
Never miss a thing! Sign up for our newsletter to stay updated.
Research Stash is a curated collection of tools and News for S.T.E.M researchers
Have any questions or want to partner with us? Reach us at [email protected]